Overview
- 6DOF robotic arm driven by stepper drivers
- Incorporates cycloidal gearbox, planetary gearbox, and HTD belts
- Features a differential belt wrist to reduce end effector weight
- Utilizes closed-loop joint control with magnetic encoders
Project Motivation
- Opportunity to practice full-stack robotics development
- Integration of mechanical design, embedded computer science, AI, and electronics
- Exploration of combining AI and robotics with the use of Transformer models
MECH
Cycloidal Drive 1
Custom Thrust Bearing
Belt driven differential joint
Heavily influenced by Mishin Machine link
CS
MoveIt Ros simulation
Random motion test
ELEC
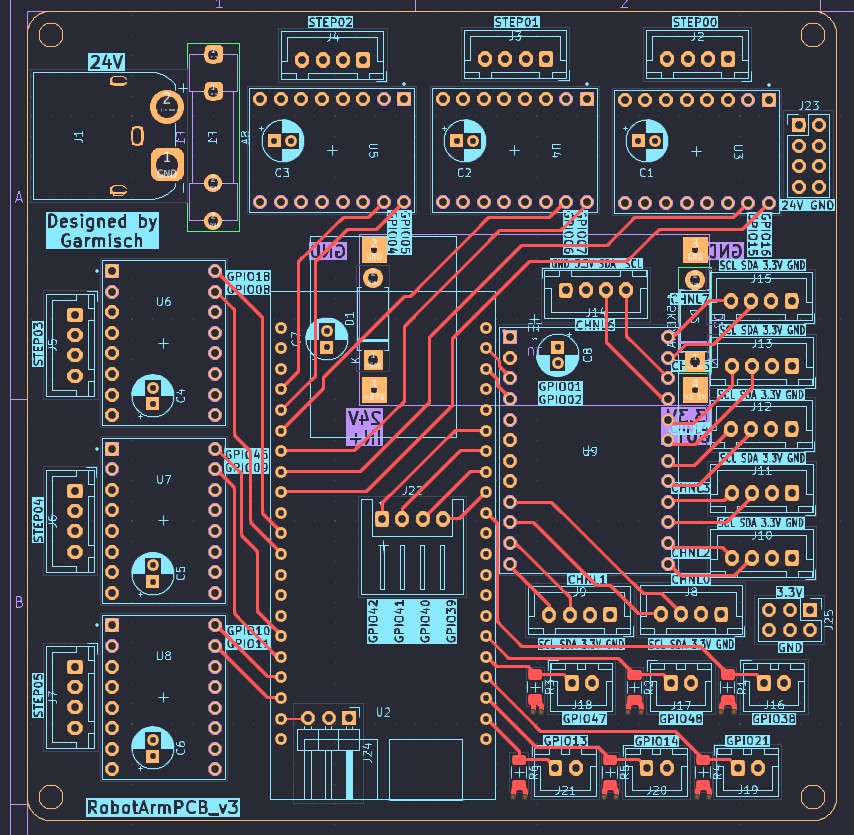
Iterated through multiple versions of PCB