Research Experience
- Current Project: Developing a seahorse tail-inspired hydraulic soft actuator.
- Combines pre-curled mechanics and material stiffness for enhanced hooking force.
- Differentiates from traditional soft actuators that rely solely on hydraulic/pneumatic force.
- Key Responsibilities:
- Design and implement characterization experiments.
- Develop control systems for the actuator.
- Facilitate application demonstrations.
-
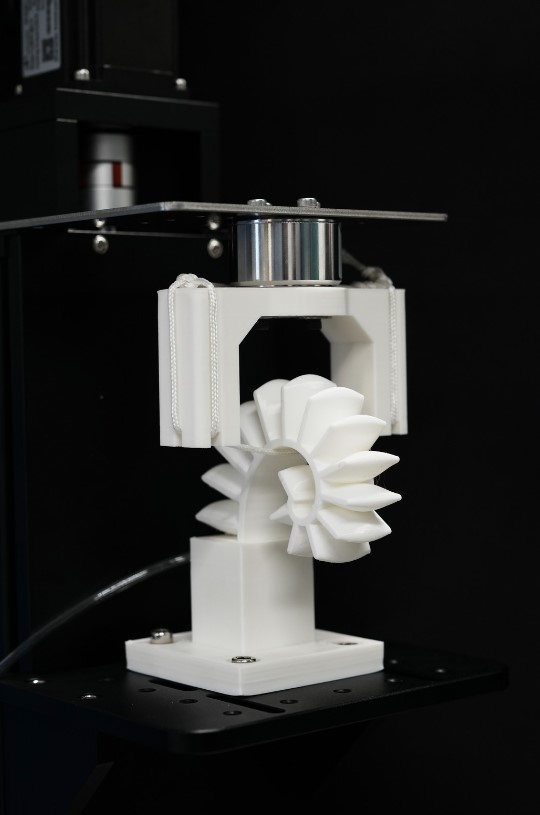
Experiment setup
- Skills Developed:
- Conducted thorough literature reviews to inform experimental design.
- Streamlined design processes by standardizing protocols based on comparable studies.
- Minimized variabilities (e.g., vibrations, structural flex) to enhance accuracy and reliability of results.
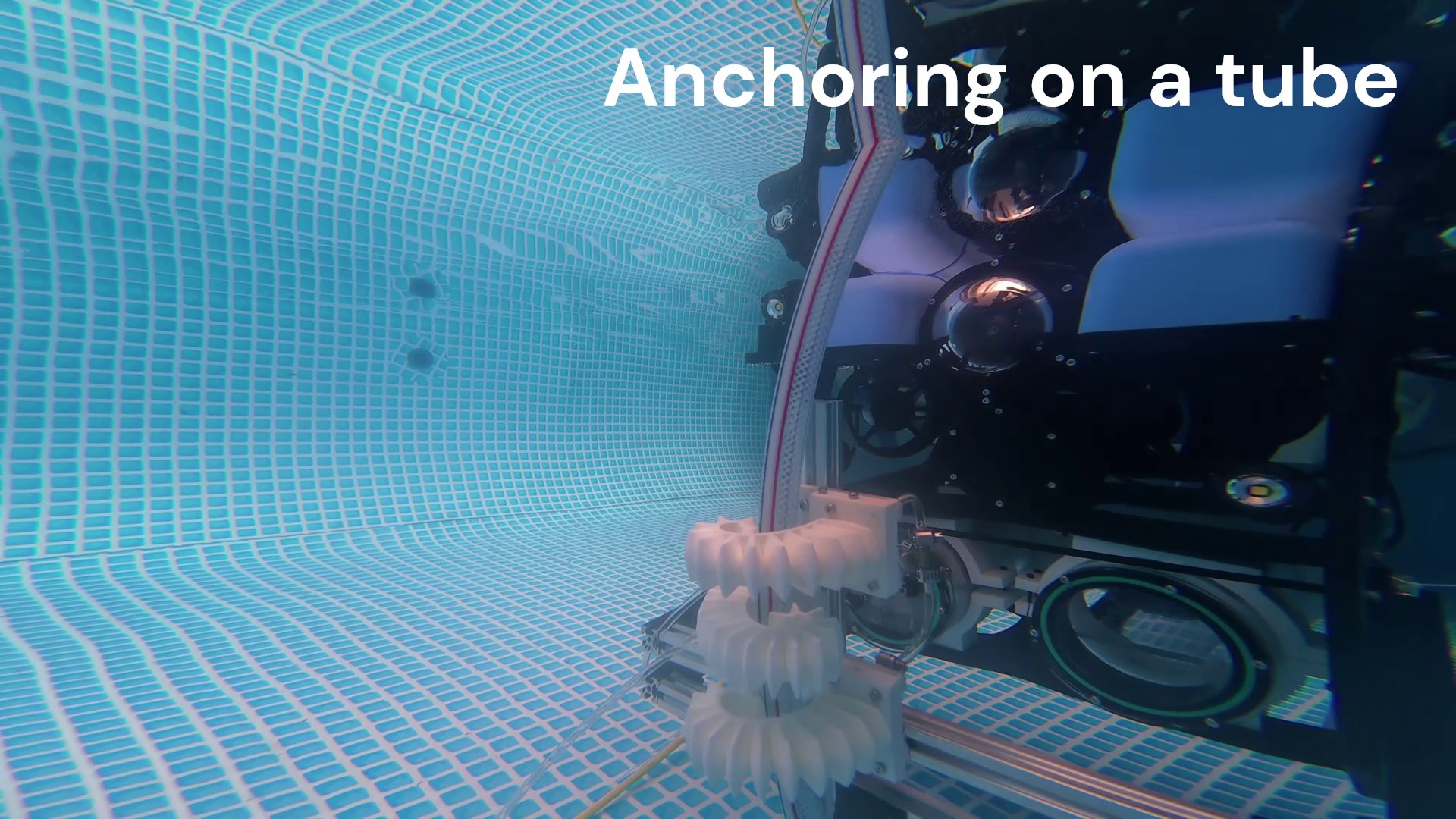
- Research Demo: Designed and built a remotely-operated vehicle (ROV) extension unit.
- Functionality: Deploys the actuator as an underwater gripper/anchor.
- Integrated electronic components and a pressure control system that draws water directly from the ocean.
- Facilitated underwater tasks such as anchoring and gripping.
- Served as a demonstration project for visiting professionals in the marine industry.

-
Underwater demo
-
Collaborative Engagement:
- Actively participate in weekly research team meetings.
- Engaged in discussions on diverse issues in soft robotics.
- Expanded understanding of the field and identified current research gaps.
- Gained insights into the PhD student experience and strategies for success.
Research output
- We have published a workshop paper at the Robotics: Science and Systems (RSS) conference, 2nd Workshop on Dexterous Manipulation.
- Accessible here: https://openreview.net/forum?id=2uDOjKQG85
- We are currently working on simulations for the actuator and aims to release the final paper at the coming January